
-
-
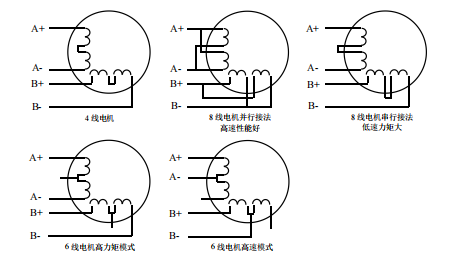
2021-05-17 二相电机四线、六线、八线的区别
四相混合式电机也称二相混合式电机,只是四相电机的绕组引出线有多种接法。多组线圈多个抽头,是为了适应不同工控条件而设计的。由于步进电机的线圈,与转速、转矩有着密切的关系。高速与低速工作的步进电机参数有所不同。通常,高速步进电机的电感要求小一点,低速工作时要求大一点的电感量。
-

-
2021-05-15 温升对电机有什么影响
电机在多高的温度下能够正常工作?电机运行能够承受多高的温度?”这个问题是企业使用电动机所面临的常见问题。电动机的工作温度考虑的主要是转子上漆皮能承受的最高温度,如果超过这一温度,漆皮容易被破坏,而出现故障。如果电动机的允许最高工作温度为150摄氏度,而使用环境为30摄氏度,那么允许的最高温升只能是120k。
-

-
2021-05-13 步进电机驱动器细分的优点及作用
步进电机驱动器细分的优点及作用
-

-
2021-05-12 线性电源是什么?和开关电源有什么区别?
电源系统是电路设计中的能量源泉,好的电源系统是电路稳定的基础和保障。线性电源和开关电源是市面上常见的两种电源,这两者有什么区别呢?
-
-
2021-05-08 开关电源是什么?有什么用?是什么原理?
通过控制电路,使电子开关器件不停地“接通”和“关断”,让电子开关器件对输入电压进行脉冲调制,从而实现DC/AC、DC/DC电压变换,以及输出电压可调和自动稳压。
-

-
2021-05-06 profinet总线型驱动器有什么优势?
PROFINET由PROFIBUS国际组织(PROFIBUS International,PI)推出,是新一代基于工业以太网技术的自动化总线标准。作为一项战略性的技术创新,PROFINET为自动化通信领域提供了一个完整的网络解决方案,囊括了诸如实时以太网、运动控制、分布式自动化、故障安全以及网络安全等当前自动化领域的热点话题,并且,作为跨供应商的技术,可以完全兼容工业以太网和现有的现场总线(如PROFIBUS)技术,保护现有投资。
-

-
2021-05-05 ethercat和modbus/RS485和canopen总线型驱动器的特点区别
ethercat和modbus/RS485和canopen总线型驱动器的特点区别
-
-
2021-04-30 什么是现场总线?为什么要采用现场总线技术?现场总线驱动器有哪些优点?
现场总线驱动器是应用在生产现场、在微机化测量控制设备之间实现双向串行多节点数字通信的系统,也被称为开放式、数字化、多点通信的层控制网络。 现场总线技术将专用微处理器置入传统的测量控制仪表,使它们各自具有了数字计算和数字通讯能力,采用可进行简单连接的双绞线等为总线,把多个测量控制仪表连接成网络系统,并按公开、规范的通信协议,在位于现场的多个微机化测量控制设备之间及现场仪表与远程监控计算机之间,实现数据传输与信息交换,形成各种适应实际需要的自动控制系统。
-
-
2021-04-27 为什么伺服电机又叫伺服同步电机?
伺服电机分交流伺服和直流伺服其交流伺服又有同步和异步之分永磁同步电机其实同步交流伺服电动机。 可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
-

-
2021-04-26 怎么样通过PLC脉冲频率计算步进电机转速?
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
-
-
2021-04-24 怎么样避开步进电机共振区?
电机振动是经常遇到的问题,会影响电机的使用寿命,可以通过机械和电磁方面解决。但是低速振动是所有步进电机都存在的正常现象,是什么原因? 离散的,逐步的运动使步进电机具有精确的定位能力,这也导致某些不良的性能特征,步进电动机由于转子的惯性而在每一步中自然会表现出较小的振动,这会导致电动机略微超调(或在某些情况下会下冲)步进位置并振荡,直到以正确的步进角“稳定”下来。如果这些振荡的频率与电动机的固有频率相匹配,则会发生共振,从而导致听得见的噪声,振动,并在极端情况下导致失步或失速。
-
-
2021-04-23 电机为什么会振动?
先分清是磁振动还是机械振动,如果电机在启动时有振动,迅速切断电源,在还没有停止转动时,振动继续则是机械振动,振动停止则为电气的磁振动. 机械震动检查轴承和安装的水平度以及连接的牢固性.磁振动则多是由于电机的定子绕组或是硅钢片的问题.
-

-
2021-04-21 IP65和IP66哪个防水等级高
-

-
2021-04-19 伺服电机和步进电机的区别
控制精度不同;步进电机的相数和拍数越多,它的精确度就越高,伺服电机取块于自带的编码器,编码器的刻度越多,精度就越高。
-
-
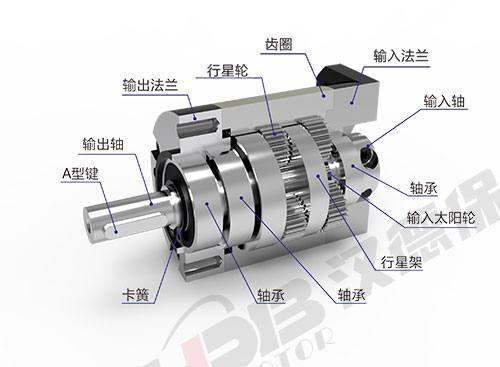
2021-04-16 行星减速机在步进、伺服控制中的常见作用
我公司生产的行星减速机主要用在配置步进电机和伺服电机控制系统上面,其功能简单的说就是降低转速,增大扭矩。下面来说说行星减速机在伺服控制中的常见应用和它的主要功能。

